


1 /
1
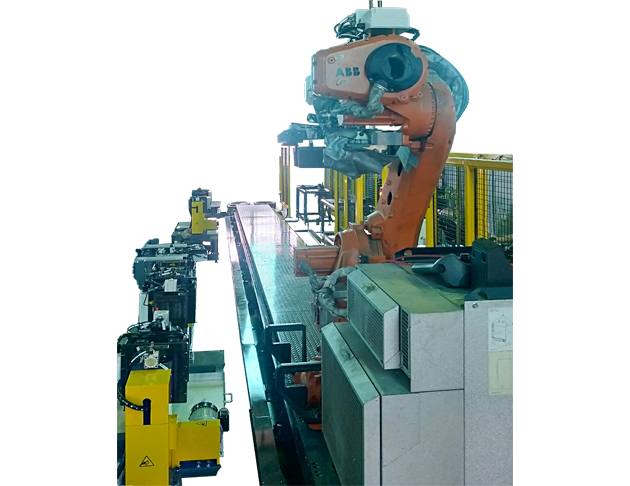
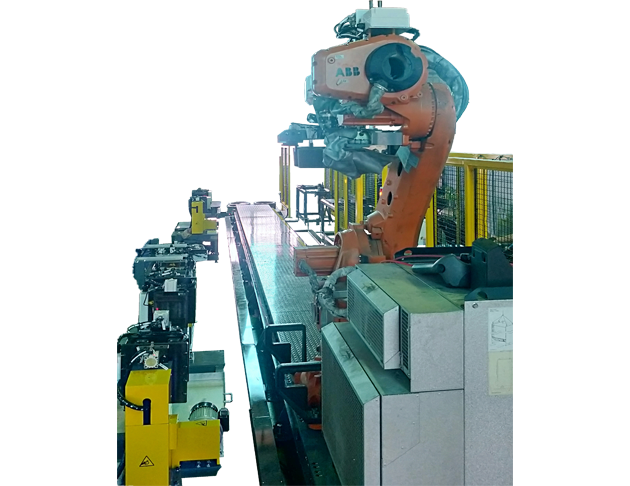
Robot Transfer Platform
Merchandise number:K1145
Description:
- For robot transfer moving
- Link function with robot, external axis and each station machine
- Integrated design